Jessica Field Robotique tout-terrain
Jessica Field, Training Robot, 2006
Ce projet aborde des enjeux sociaux liés à la création commerciale de robots dotés d’intelligence artificielle et réagissant aux attentes et aux désirs humains. Robotique tout-terrain a recours à des œuvres vidéo pour révéler la façade de cette attente. Les vidéos sont idéalistes et dépeignent les robots d’une manière virtuelle; leur comportement est à la fois harmonieux et ordonné et ils comblent les désirs de l’artiste en faisant tout ce qu’elle leur demande de faire. Dans l’exposition, les vrais robots n’incarnent pas ces comportements; ils ont leur propre intelligence, leurs propres défauts et sont loin de répondre aux attentes de Field à leur égard. Aussi, ils ne correspondent presque jamais aux attentes exprimées par la vidéo. Les robots manifestent plutôt des comportements qui leur sont propres, des comportements qui ne sont guère conformes aux attentes de l’artiste et qui leur confèrent un caractère bien à eux.
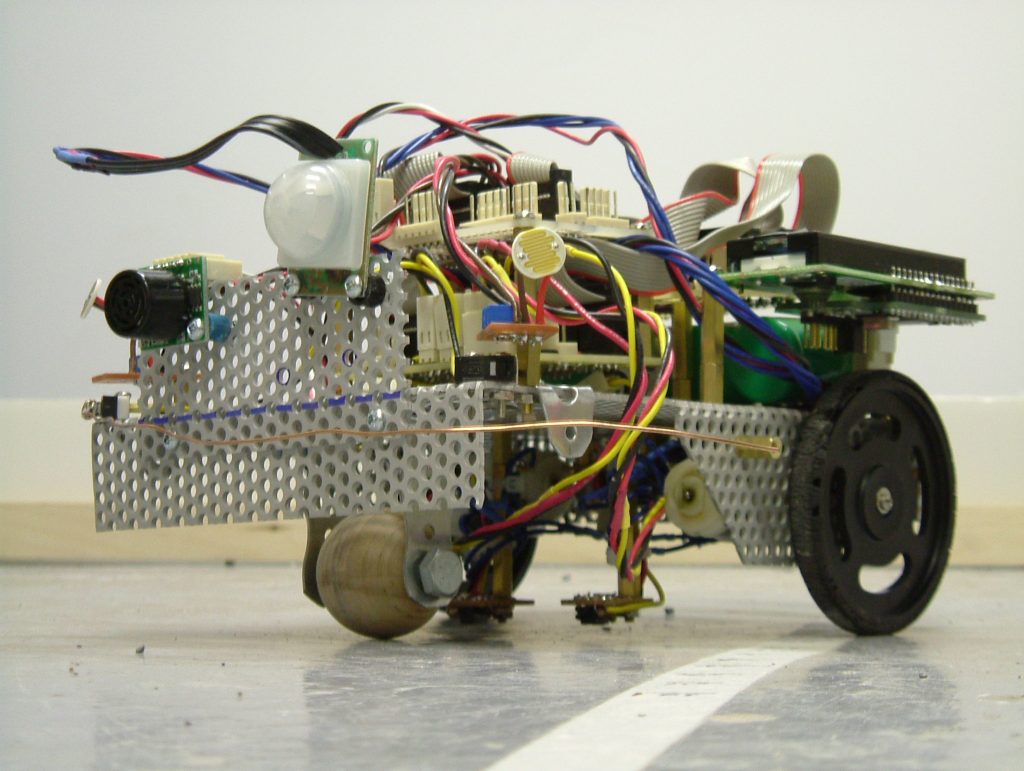
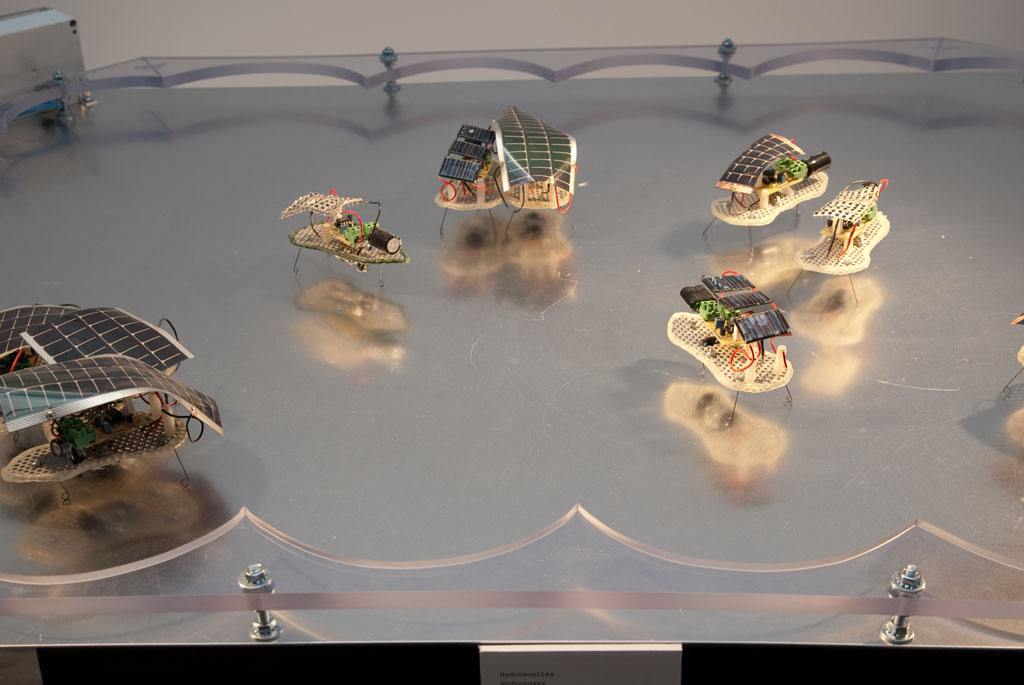
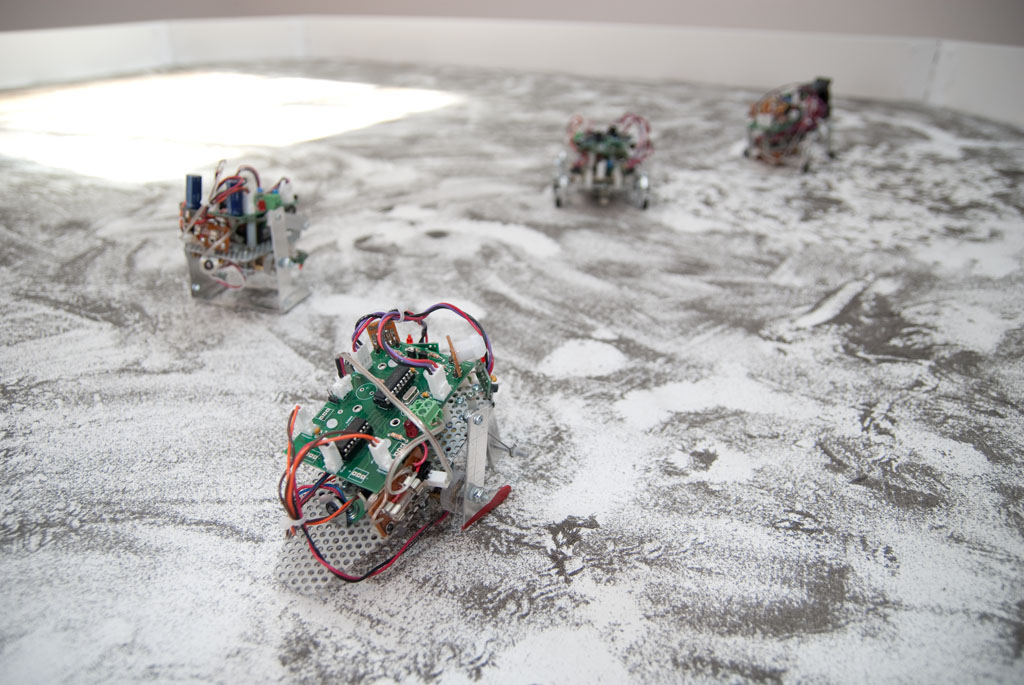
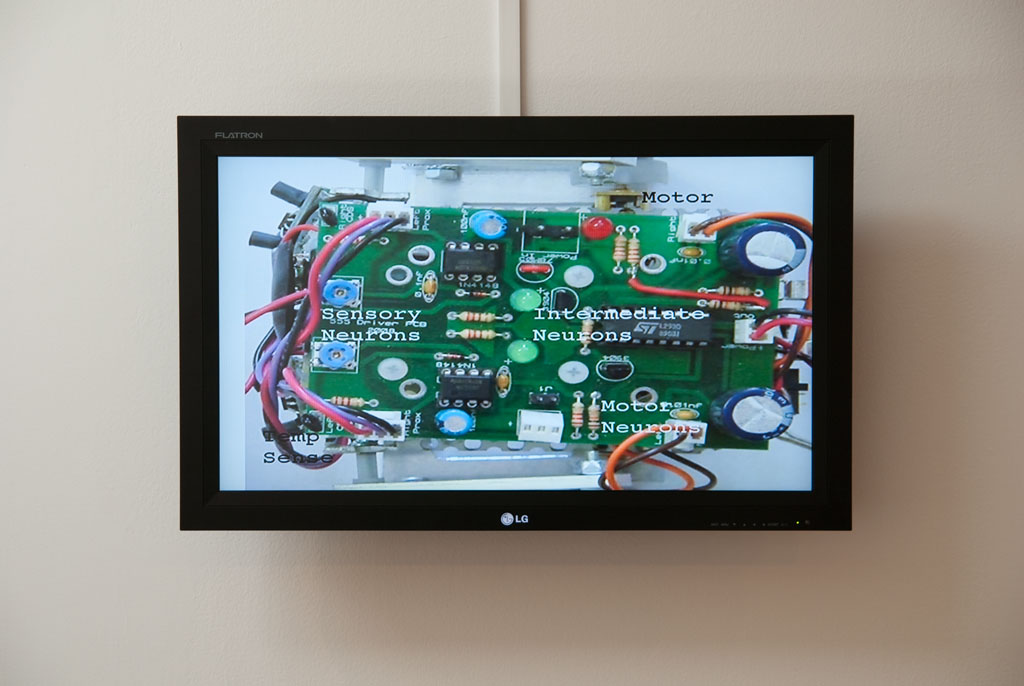
Robotique tout-terrain explore l’idée d’évolution à l’aide de trois différents types de robots qui interagissent entre eux comme dans un écosystème. Chaque type de robot a son propre degré de sophistication. Le plus simple agit tel un organisme unicellulaire. Le robot de deuxième niveau a une structure organique plus complexe; ses sens gèrent les réactions de son corps, mais sans processus mentaux pour interpréter l’expérience. De la conception à la réalisation, le processus de création des robots susmentionnés ne permet pas de les reprogrammer afin d’améliorer leur comportement. Par conséquent, ces robots sont statiques et incapables d’évoluer, au contraire des robots de haut niveau. On peut modifier ces derniers indéfiniment pour les rendre plus efficaces par rapport à leur environnement, leur donnant la possibilité de se souvenir de leurs expériences et d’interpréter logiquement leurs données sensorielles. Tout de même, ils n’arrivent pas à accomplir les exploits robotiques de la vidéo. Combien d’évolutions doivent subir ces robots avant de se comporter conformément aux attentes de l’artiste ? La question s’impose.
Le robot stéréotypé a comme fonction de combler les désirs des êtres humains et de leur donner une satisfaction immédiate. Cependant, les robots ont de nombreuses contraintes matérielles qui entravent leur évolution et les empêchent de réaliser complètement l’idéal que nous leur imposons. Notre conception imaginaire du robot vient alors compléter le portrait.
Vernissage
le samedi 16 mai à 17 h
Visite commentée (en anglais)
le samedi 16 mai à 16 h
en présence de l’artiste et de Peter Flemming, auteur d’une publication à venir sur Robotique tout-terrain
Périodes d’activité des robots
robots flagellés protozoaires : de midi à 17 h
hydrozoaires : de 14 h à 15 h 30
arthropodes : de 14 h à 17 h
Autres lectures :
Jessica Field, Training Robot, 2006
Jessica Field travaille avec l’installation, la vidéo et la performance pour créer des systèmes intelligents artificiels qui étudient la théorie dynamique de la personnalité, réunissant la recherche en psychologie et l’informatique. Jessica a exposé en Suède, en Suisse, en Autriche et au Canada. Elle a participé à Electrohype 2008, au Musée des Beaux-Arts de Montréal, à Oboro, Optica, au Musée Tingely et au Kunsthaus Graz.
Jessica Field enseigne à temps plein à l’Université Ryerson et anime des ateliers pour InterAccess. Elle a obtenu son AOCAD à l’Ontario College of Art and Design, Toronto, Ontario et sa MFA à l’Université Concordia à Montréal, Québec.
Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland
Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland

Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland

Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland
Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland
Jessica Field, Robotique tout-terrain, 2009. Photo : Paul Litherland